Конструктивные особенности современных ракет
Конструктивные особенности современных ракет
Сегодня существует много различных типов ракет. Большинство из них снабжены системой управления, которая обеспечивает полет по требуемой траектории. Среди управляемых ракет большую группу составляют баллистические ракеты, движение которых, за исключением сравнительно небольшого участка управляемого полета с работающими ДУ, происходит по траектории свободно брошенного тела (баллистической траектории). К этой группе относятся оперативно-тактические и стратегические боевые ракеты класса «земля-земля» и «корабль-земля» с дальностью полета от сотен до нескольких тысяч километров.
По числу ступеней ракеты делятся на одноступенчатые и составные (многоступенчатые). Одноступенчатая баллистическая ракета состоит из полезного груза (ГЧ) и ракетного блока, образованного в общем случае из ракетной двигательной установки с топливным отсеком с запасом ракетного топлива, системы подачи топлива, системы управления и силовых элементов конструкции. Основная характеристика баллистической ракеты — идеальная скорость, которая может быть достигнута в конце активного участка полета при движении по прямой (вне атмосферы и поля земного тяготения) под действием только силы тяги ракетного двигателя.
Составные ракеты могут быть различных конструктивных схем. Различают конструктивные схемы с поперечным делением (ракетные блоки ступеней расположены последовательно по высоте ракеты и также последовательно вступают в работу), с продольным делением (так называемая пакетная схема, допускающая одновременную работу блоков различных ступеней) и комбинированную, сочетающую особенности первых двух.
Конструкция ракет существенным образом зависит от ее назначения и типа используемых ракетных двигателей. Большинство современных боевых ракет снабжаются РДТТ. Ракетам более ранних разработок присущи ЖРД с насосной подачей топлива, в том числе с дожиганием генераторного газа, вращающего турбину турбонасосного агрегата. Для ракетных блоков первых ступеней ракет характерны многокамерные ракетные двигатели, имеющие на две или четыре камеры сгорания один общий мощный ТНА, что позволяет уменьшить высоту ДУ.
Основные силовые элементы конструкции ракеты выполняются в виде тонкостенных оболочек из высокопрочных легких сплавов или композиционных материалов. В ракетном блоке с ЖРД большую часть объема занимает топливный отсек с жидким ракетным топливом, состоящий из баков с окислителем и горючим. Баки связаны с ЖРД магистральными трубопроводами и снабжены устройствами для заправки и слива компонентов и контроля их уровня. В баках могут быть установлены перегородки для демпфирования продольных и поперечных колебаний топлива во время полета.
Наиболее экономичной и распространенной является силовая схема топливного отсека с несущими баками, стенки которых одновременно выполняют роль оболочки корпуса ракеты. Создавая в таких баках сравнительно небольшое внутреннее давление наддува, можно исключить опасную для тонкостенных оболочек потерю устойчивости и одновременно способствовать бескавитационной работе насосов ТНА. Длина топливного отсека несколько сокращается, если он выполняется в виде единой оболочки, объем которой делится на полости горючего и окислителя герметичной перегородкой. Для стабилизации ракеты промежуточная перегородка может разделять пополам полость, занятую одним и тем же компонентом, причем компонент сначала расходуется из нижней части бака, а затем — из верхней.
В схеме топливного отсека с подвесными баками (которые могут иметь цилиндрическую, сферическую, торообразную или иную более сложную форму) они крепятся силовыми узлами к несущему корпусу. С другими отсеками такой корпус соединяется также торцевыми шпангоутами. Аналогичную конструкцию имеет хвостовой отсек, в котором размещаются ЖРД и некоторые элементы арматуры системы подачи топлива.
Разделение ракетных блоков может происходить как до включения ЖРД блока последующей ступени путем торможения блока предшествующей ступени вспомогательными ракетными двигателями («холодное» деление), так и при работающем ракетном двигателе на участке спада тяги («горячее» деление).
Управление вектором тяги современных ЖРД, необходимое для полета ракеты по заданной программе, осуществляется поворотом камеры РД с помощью управляющих ракетных двигателей малой тяги, вдувом части газа за критическую часть сопла и другими способами. В случае многокамерной ДУ управляющий момент можно также создать рассогласованием тяг неподвижных камер, тяга каждой из которых регулируется в определенных пределах.
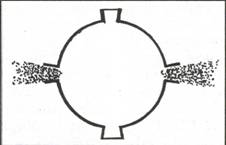
В ракетном блоке с РДТТ роль топливного отсека с запасом твердого топлива выполняет корпус РД, а в хвостовом отсеке размещается сопловой блок и оборудование, необходимое для управления вектором тяги. Управление осуществляется либо поворотом одного или нескольких сопел, либо боковым вдувом газа в основной поток продуктов сгорания в зоне расширяющейся части сопла, что приводит к газодинамической асимметрии потока и перераспределению давления на стенки раструба, создавая результирующий управляющий момент относительно центра масс ракеты.
Тяга, развиваемая РДТТ, передается на последующие отсеки или ракетные блоки (в составной ракете поперечного деления) с помощью переходной стержневой фермы или подкрепленной стрингерами оболочки. Чтобы иметь возможность выключить РД до полного выгорания топлива и отделить корпус РДТТ от головной части боевой ракеты, на его переднем днище могут быть предусмотрены наклонные сопла обратной тяги. При достижении определенного сочетания значения скорости полета, ее направления и координат ракеты по специальной команде системы управления эти сопла открываются и направляют газовый поток из камеры сгорания через переднее днище корпуса, создавая обратную тягу, обеспечивающую разделение.
Система управления ракеты предназначена для получения параметров движения в конечной точке участка выведения, необходимых для выполнения поставленной перед ракетой задачи. Одновременно СУ должна обеспечивать решение задачи устойчивости движения и снижения внешних нагрузок на корпус ракеты. В простейшем случае траектория выведения ракеты задается заранее. В более сложном применяется терминальная система управления, которая не приводит траекторию к заданной, а допускает существенные отклонения от нее, следя, однако, за тем, чтобы кинематические параметры в конце активного участка были расчетными. Последний метод требует применения мощных цифровых ЭВМ.
Способы получения управляющих усилий

Применение газодинамических и вспомогательных аэродинамических рулей малой площади
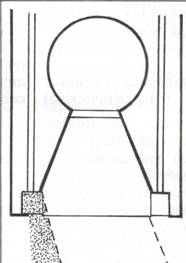
Метод впрыска в закритическую часть сопла жидкого газа
Применение газоотк лоняющих пластин
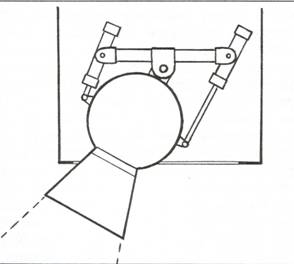
Поворот камеры сгорания
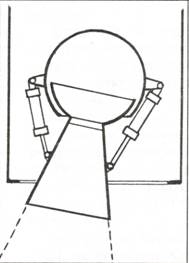
Применение отклоняемого сопла камеры сгорания
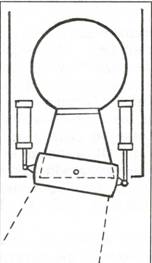
Применение управляющего соплового дефлектора
Применение верньерных или струйных двигателей
СУ состоит из датчиков, преобразующих устройств и рулевых машин. В качестве датчиков обычно используются гироскопические стабилизированные платформы, сохраняющие свое положение относительно неподвижных звезд неизменным и позволяющие измерять углы отклонения корпуса ракеты относительно связанной с такими платформами системы координат. На ГСП устанавливаются приборы, реагирующие на линейные ускорения в продольном и двух поперечных направлениях. Интегрируя нужное число раз сигналы, снимаемые с этих приборов, можно получить полное представление о кинематике движения ракеты, в частности о скоростях и сносах в поперечных к траектории направлениях.
Рулевые машины являются сложным электромеханическим (гидравлическим) приводом для поворотов основного РД или специальных рулевых РД в соответствии с сигналами, вырабатываемыми преобразующими устройствами. Помимо основных задач СУ выполняет и другие функции: подачу питания на нужные приборы, программно-логическое управление работой систем ракеты при подготовке и старте ракеты, взведение взрывательных устройств. Высокие требования, которые предъявляются к надежности СУ, приводят к необходимости дублирования и резервирования наиболее ответственных контуров управления.
Обеспечивает работу системы управления бортовая цифровая вычислительная машина. Она предназначена для решения на борту движущегося объекта (ракеты) задач управления движением и стабилизацией, автономной и инерциальной навигации, программного управления и т. д. Различают специализированные и универсальные БЦВМ.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Сравнительная стоимость ракет и самолетов-снарядов
Сравнительная стоимость ракет и самолетов-снарядов Существует множество различных, иногда взаимоисключающих оценок стоимости производства двух главных видов германского «секретного оружия». Одно представляется бесспорным: для обстрела крупных целей при среднем
Глава 12 Судьба древних и современных чудес света
Глава 12 Судьба древних и современных чудес света Глобальное потепление или охлаждение океанских течений: если действия одного будут частично приглушены другим, как предполагают некоторые модели, тщательно механизированные сельскохозяйственные угодья Европы в
Глава 19 СЕКРЕТЫ РАКЕТ «ФАУ»
Глава 19 СЕКРЕТЫ РАКЕТ «ФАУ» После войны было написано немало чепухи относительно немецкого ракетного испытательного полигона в Пенемюнде и многочисленных шпионах, пытавшихся выведать секреты нового оружия немцев – ракет «фау». К примеру, существует романтическая
Особенности
Особенности Одним из самых поразительных пробелов в литературе Коминтерна представляется отсутствие сколько-нибудь всеобъемлющих материалов, рассматривающих проблемы действительного захвата власти. Существует мало свидетельств о выборе стратегии и тактики в этот
Глава III ДЕЛА ПО ОСКОРБЛЕНИЮ ЧЛЕНОВ ИМПЕРАТОРСКОЙ СЕМЬИ: ОСОБЕННОСТИ ПРЕСТУПЛЕНИЯ И ОСОБЕННОСТИ ИСТОЧНИКА
Глава III ДЕЛА ПО ОСКОРБЛЕНИЮ ЧЛЕНОВ ИМПЕРАТОРСКОЙ СЕМЬИ: ОСОБЕННОСТИ ПРЕСТУПЛЕНИЯ И ОСОБЕННОСТИ ИСТОЧНИКА Имперское «Уложение о наказаниях» рассматривало оскорбление членов правящей династии как серьезный проступок – до восьми лет каторги мог получить человек,
Глава 4 ОГРАНИЧЕННАЯ ВОЙНА И МОРСКИЕ ИМПЕРИИ – РАЗВИТИЕ ТЕОРИИ КЛАУЗЕВИЦА И ЖОМИНИ ОБ ОГРАНИЧЕННОЙ ТЕРРИТОРИАЛЬНОЙ ЦЕЛИ И ЕЕ ПРИМЕНЕНИЕ В УСЛОВИЯХ СОВРЕМЕННЫХ ИМПЕРИЙ
Глава 4 ОГРАНИЧЕННАЯ ВОЙНА И МОРСКИЕ ИМПЕРИИ – РАЗВИТИЕ ТЕОРИИ КЛАУЗЕВИЦА И ЖОМИНИ ОБ ОГРАНИЧЕННОЙ ТЕРРИТОРИАЛЬНОЙ ЦЕЛИ И ЕЕ ПРИМЕНЕНИЕ В УСЛОВИЯХ СОВРЕМЕННЫХ ИМПЕРИЙ Уже упоминавшиеся немецкие военные планы, основанные соответственно на оккупации Бельгии и Эльзаса–
Правила выбора современных и стилизованных костюмов
Правила выбора современных и стилизованных костюмов Итак, современные свадебные костюмы допустимы на свадьбе по русской традиции, но при соблюдении ряда правил.Такие же условия подходят и для подбора костюмов в русском стиле.Читая эту книгу, вы уже могли запомнить эти
Несколько современных мультимедийных плееров
Несколько современных мультимедийных плееров Автор: Олег НечайОпубликовано 19 октября 2011 годаБюджетные модели3Q 3QMMP-F420HWМультимедийный плеер начального уровня отечественного бренда 3Q, выпускающего также нетбуки, недорогие ноутбуки и планшеты. Установка внутреннего
«Урбанизация все больше отдаляет человека от природы. Противопоставляете ли вы какую-то альтернативу жизни людей в «каменных джунглях» современных городов?»
«Урбанизация все больше отдаляет человека от природы. Противопоставляете ли вы какую-то альтернативу жизни людей в «каменных джунглях» современных городов?» — Даже к самым большим советским городам слова «каменные джунгли» можно отнести с натяжкой. Москва, Ленинград,
Вячеслав Булавкин: БИЕНИЕ СЕРДЦА РАКЕТ
Вячеслав Булавкин: БИЕНИЕ СЕРДЦА РАКЕТ — Хотелось бы, как Амундсен, первым покорить Полюс?— У меня такое ощущение, что это я делал много раз…— В таком случае я процитирую великого путешественника. Он сказал: "Сила воли — первое и самое важное качество искусного
Приложение 1 Обозначения советских (российских) баллистических ракет стратегического назначения
Приложение 1 Обозначения советских (российских) баллистических ракет стратегического назначения *-дано по книге А.В. Карпенко «Российское ракетное оружие
Приложение 3 Тактико-технические характеристики баллистических ракет
Приложение 3 Тактико-технические характеристики баллистических ракет 1. Баллистические ракеты средней дальностиБРСД Р-5М (СССР). Создана под руководством С. П. Королева. Одноступенчатая с ЖРД. Топливо: окислитель — жидкий кислород, горючее — этиловый спирт. Тяга
Вячеслав Булавкин: БИЕНИЕ СЕРДЦА РАКЕТ
Вячеслав Булавкин: БИЕНИЕ СЕРДЦА РАКЕТ — Хотелось бы, как Амундсен, первым покорить Полюс?— У меня такое ощущение, что это я делал много раз…— В таком случае я процитирую великого путешественника. Он сказал: "Сила воли — первое и самое важное качество искусного
33. Доигрались… Радиоигры на современных радиостанциях
33. Доигрались… Радиоигры на современных радиостанциях Миновали времена «полного сурьеза» в средствах массовой информации. Надеемся, что они ушли в прошлое навсегда, как и культовое словечко «сурьез». Его на самой заре «эпохи оттепели» употребил «бюрократ от культуры»
35. Радиокультура. оБ актуальном и вечном. Программы о культуре и радиотеатр на современных радиоволнах
35. Радиокультура. оБ актуальном и вечном. Программы о культуре и радиотеатр на современных радиоволнах Культура… Со всех сторон можно услышать это слово. Да вот только подразумеваются при этом очень разные вещи. Для кого-то культура – не плевать в подъезде и пропускать